CUDA核心概念与内存层次
想在一张图看懂 GPU 的线程组织与内存层次?本文用表格 + Mermaid 图 + 代码示例,3 分钟带你摸清 Kernel、Warp、合并访存与 bank 冲突的底层逻辑。
📚 核心概念速读
| 名称 | 一句话定义 | 省流 |
|---|---|---|
| Kernel | 在 GPU 上并行执行的函数 | 把循环搬进 GPU |
__global__ |
修饰 Kernel,CPU 端调用 | “这函数在 GPU 上跑” |
threadIdx.* / blockIdx.* |
线程/块坐标 | 每线程自带“学号” |
<<< grid, block >>> |
Kernel 启动语法 | 告诉 GPU “来几拨人干活” |
| Warp (32 线程) | 锁步执行的最小调度单元 | 小队齐步走 (SIMT) |
省流:写 Kernel → 设 Grid/Block → GPU 并行跑 →
cudaDeviceSynchronize()等结果。
Kernel 基础:__global__ 与线程索引
在真正调用 CUDA API 前,建议先写一个通用错误检查宏,否则内核即使失败也可能“静默”通过编译与运行,难以及时发现问题。
1 | // 简易错误检查:若调用返回非 cudaSuccess,则打印信息并退出 |
不写
CUDA_CHECK也能跑,但如果 Launch 参数超界、显存不足或其他运行时错误,就会在cudaDeviceSynchronize()处返回非零状态;若从未检查,你会在结果错乱时才发现。宏的成本极低,却能第一时间定位错误,强烈推荐写上。
1 | __global__ void saxpy(const float* x, const float* y, float* out, float a, int n) { |
__global__:声明 GPU 执行 / CPU 调用 的函数。threadIdx.{x,y,z}:线程在 Block 内 的局部坐标。blockIdx.{x,y,z}:Block 在 Grid 内 的坐标。blockDim.{x,y,z}:Block 尺寸;gridDim.{x,y,z}:Grid 尺寸。
💡 实用技巧:把索引计算抽成 int gid = threadIdx.x + blockIdx.x * blockDim.x;,后续 gid += blockDim.x * gridDim.x 可轻松“网格跨步循环”。
线程组织:Grid / Block / Thread / Warp
flowchart TD
G["Grid"] --> B0["Block 0"]
G --> B1["Block 1"]
B0 --> T0["Thread 0"]
B0 --> T1["Thread 1"]
B0 --> T2["Thread 2"]
B0 --> T31["Thread 31"]
subgraph "Warp(32 线程)"
T0
T1
T2
T31
end
- Grid:一次 Kernel Launch 的“全班”;最大可达数十亿线程。
- Block:可在 SM 间调度迁移的独立单元;内部可用
__syncthreads()同步。 - Thread:最细粒度执行体;寄存器私有。
- Warp (32):硬件锁步组;SIMT 让 32 线程执行同一指令。
⚠️ 分歧 (Divergence):同一 Warp 内线程 if/else 走不同分支 → 硬件掩码串行 → 吞吐掉队。
错误处理与同步
| API | 作用 | 建议用法 |
|---|---|---|
cudaGetLastError() |
捕获 Kernel Launch 级错误 | Launch 后立刻调用一次 |
cudaDeviceSynchronize() |
CPU 等 GPU 完成 & 捕获运行时错误 | 调试阶段在关键点加;生产用 Events/Streams 替代 |
省流:能跑就不代表对——GPU 错误多在 异步 回来,
cudaDeviceSynchronize()是最终裁判。
内存层次与访存
| 层次 | 可见范围 | 容量 | 延迟 | 典型用途 |
|---|---|---|---|---|
| 寄存器 | 线程 | KB 级 | 🟢 最低 | 私有临时变量 |
| Shared | Block | 64~100 KB | 🟢 低 | Block 内数据复用 |
| L2 Cache | 全 GPU | MB 级 | 🟡 中 | 缓解全局访存 |
| Global | 全 GPU | GB 级 | 🔴 高 | 大规模数据 |
| Constant / Texture | 全 GPU | 64 KB / 48 KB | 🟢(只读缓存) | 只读 & 空间局部性 |
flowchart TD
Reg[寄存器] --> Shm[共享内存]
Shm --> L2[L2 Cache]
L2 --> Mem[全局显存]
Mem --> Host[主机内存]
为什么表格里有 Constant / Texture,却没画在图上?
这两块只读缓存(常量缓存 & 纹理缓存)实际上挂在 L2 旁边,走的是同一显存通道。为了让主数据路径更直观,我在图里省略了它们;你可以把它想成 “贴在 L2 侧面的专用快速通道”,专门服务 小而频繁的只读数据(比如卷积核、查找表)。
合并访存 (Coalescing)
同一个 Warp 的 32 线程若 按地址连续 访问,可被 GPU 合并为 1~2 次 32/64/128B 事务:
1 | // 好:线程 i 访问 a[i] |
省流:相邻线程 → 相邻地址 → 带宽“打包发货”🚚。
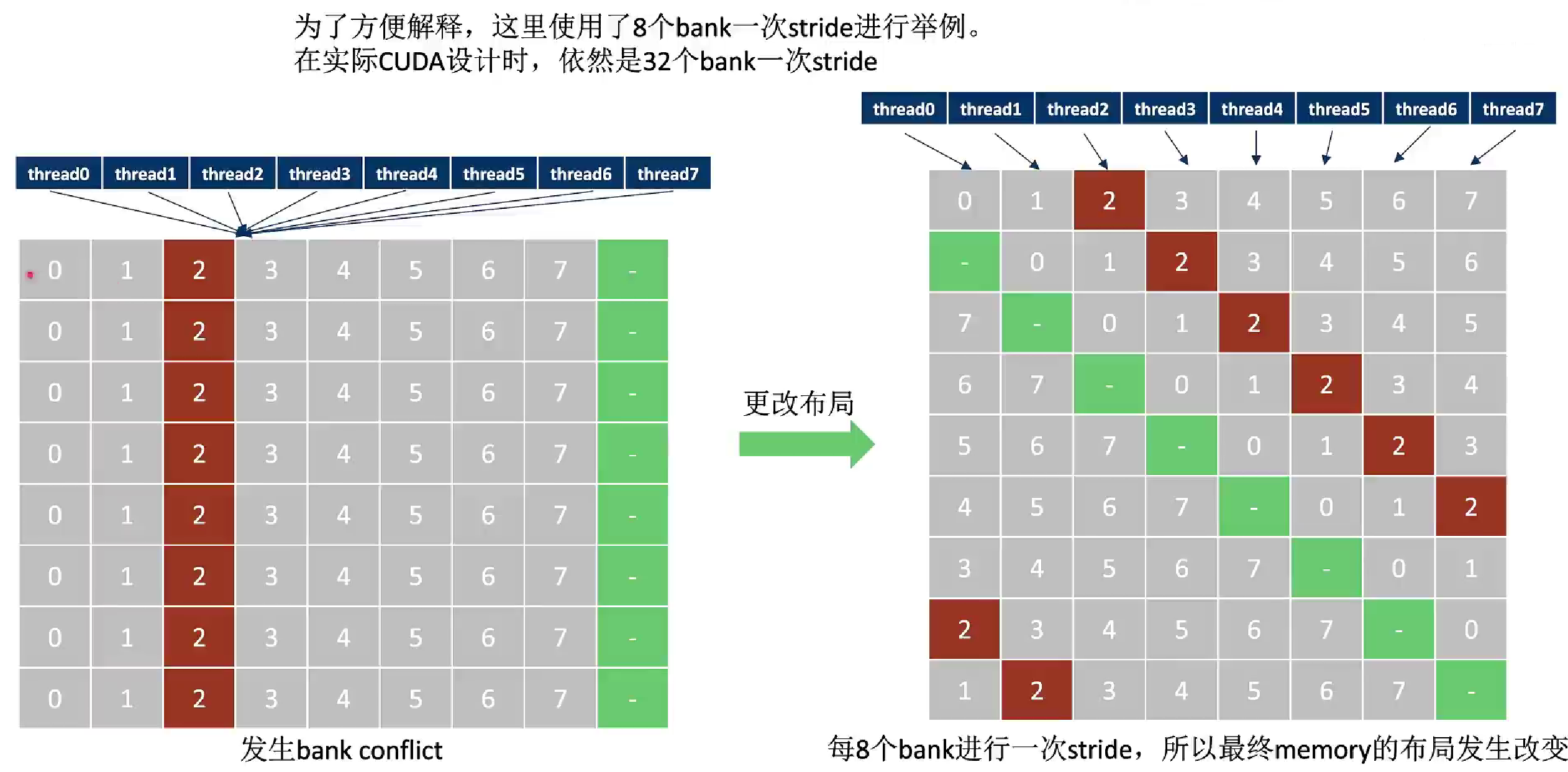
共享内存 Bank 冲突与 +1 Padding
共享内存就像 32 条并排的高速收费通道(32 个 bank)。每条通道一次只能通过 1 辆车(一次访问)。
📦 tile 是什么?为什么和 shared 形影不离?
- tile 的定义:把大矩阵/张量切成
TILE_DIM × TILE_DIM的“小方块”,同一个 thread block 负责读取、处理并写回这一方块。这个子区域就叫 tile。 - 与 shared 的关系:tile 通常先被搬进 shared memory 暂存,线程在片上对其做转置/卷积/归约等操作,再合并写回全局内存。
- 为何配合使用
- 合并访存:按列的零散全局访问 → 读入 tile → 在 shared 内转置 → 按行合并写,带宽翻倍。
- 数据复用:tile 内数据可被 block 中不同线程反复用(矩阵乘、卷积滑窗)。
- 避开 Bank 冲突:tile 往往声明为
tile[T][T+1],多出的+1用来打散 32-bank 映射。
- 合并访存:按列的零散全局访问 → 读入 tile → 在 shared 内转置 → 按行合并写,带宽翻倍。
- 典型模板:
1
2
3
4
5
6
7
8
9constexpr int TILE_DIM = 32, BLOCK_ROWS = 8;
__global__ void kernel(const float* A, float* B, int M, int N) {
__shared__ float tile[TILE_DIM][TILE_DIM + 1]; // tile 存在 shared
int x = blockIdx.x * TILE_DIM + threadIdx.x;
int y = blockIdx.y * TILE_DIM + threadIdx.y;
// 1) 全局 → tile (合并读)
// 2) __syncthreads(); 在片上处理/转置
// 3) tile → 全局 (合并写)
} - 选型注意:
TILE_DIM=32, BLOCK_ROWS=8是常用配置;tile 过大将占满 shared 或寄存器,影响 Occupancy,需要权衡。
TILE_DIM 通常对应 blockDim.x(横向线程数 & tile 宽度)。 BLOCK_ROWS 对应 blockDim.y,代表一次搬运/计算的 行数批次;典型 8 行,通过循环搬满 32 行。
- 理想:不同线程去不同通道 → 并行一次性通过 🟢。
- 冲突:多辆车挤同一通道 → 排队串行,性能打折 🔴。
常见触发 Bank 冲突的模式(未做 +1 时)
1. 同列访问:矩阵转置/列拷贝,线程 (i,j 固定) → 地址步长 = 32×4B。
2. Stride 为 32 的倍数:Tile 宽度 32、64… 行间起点对齐同 bank。
3. 跨步写入:线程 i 访问base + i*32等模 32 重合的地址。
4. 纯行或纯列归约:只动x或y,导致多线程集中一个 bank。
5. 稀疏 gather/scatter:索引映射使(addr/4)&31分布极度不均。+1 Padding 的效果?
• ✅ 有效:前 3 类(同列访问、stride 为 32 的倍数、跨步 32)——本质都是 行间步长=32k,加 1 立刻破坏同 bank 对齐。
• ❌ 无效:纯行/列归约与高随机 gather/scatter——冲突来源是线程集中到同一地址或分布不可控,单靠填充无法分散,需要换算法或分段访问。
1 | __shared__ float tile[32][33]; // 33 = 32 + 1 (列方向额外 +1 填充) |
为什么 +1 就能避开冲突?
tile[行][列]在显存里按 行主序 排布。
- 第 0 行开始地址对齐 bank0,第 1 行本该也落 bank0。
- 把列宽从 32 ➡️ 33,让下一行起始地址向后多挪 4B,落到 bank1。
- 结果:32 行分别落到 32 个 bank,所有线程同时访问首元素 → 零冲突。
Bank 冲突为什么只看 Warp 内同周期? GPU 每个时钟只让 一个 Warp 的共享内存指令发射 → 冲突检测仅在这 32 线程之间进行;下一 Warp 要等上一 Warp 完成后才发射,时间上已错开,不会相互叠加。
主机 ↔ 设备拷贝
拷贝链路可以类比 “快递寄包裹”:
| 货物打包方式 | 举例 | “物流专用车道” | 带宽 | 可边走边干活? |
|---|---|---|---|---|
| 可分页内存 (pageable) | 普通 new/malloc |
普通公路 | 中速 | 否,需要等车到站 |
| 固定页内存 (pinned) | cudaHostAlloc() / cudaMallocHost() |
高速专用线 | 高速 | 否,但上车更快 |
| Pinned + Async Stream | cudaMemcpyAsync |
高速专用线 + 双车道 | 高速 | ✅ 运输 & 计算并行 |
- 为什么 pinned 更快? 省去 OS 页锁定 & 临时缓冲,DMA 可直接搬运。
- 为什么要异步? 像“发快递同时在家里干别的”——GPU 计算与 PCIe 传输并行,流水线利用率拉满。
- 可分页内存适合谁? 小脚本、偶尔拷 100 KB 的日志。
- Pinned but 同步拷贝:数据量大但计算无法并行,至少省掉锁页开销。
- Pinned + Async Stream:训练深度学习模型、实时视频批处理这类“边算边吃数据”的场景首选。
🔎 调试小抄
cuda-memcheck ./a.out:越界/初始化等内存错误。nvprof --print-gpu-trace ./a.out:粗粒度 Timeline。- Nsight Compute / Nsight Systems:瓶颈定位。
📝 小结
- Kernel 三件套:
__global__+ 线程索引 +<<<grid, block>>>。 - 线程组织公式:Warp(32) ⊂ Block ⊂ Grid,分歧少、Occupancy 高。
- 访存第一性原理:相邻访问 + Tile 复用 + 避免 bank 冲突。
- 拷贝优化:Pinned + Async Stream,让 PCIe 传输“打多路复用”。
记住一句话:GPU 用“成群线程”换吞吐,用“切 Warp”藏延迟,性能归根结底是访存模式与并行度的艺术 ✨